| Stabilization of Rotational Motion of Satellite with Two Torque Inputs | |
 |
|
|
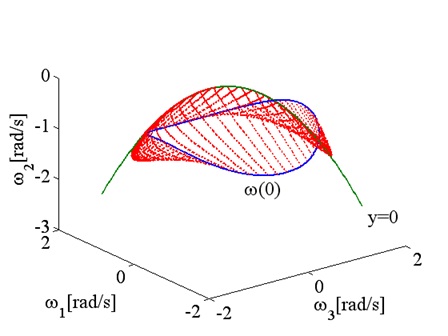
The control problem of an underactuated spacecraft has attracted a considerable amount of interest. The control method for a spacecraft equipped with less than three control torques is useful to recover the case when one of the nominal three thruster jets had failed or to reduce the consumption of propulsive fuel. The objective of this study is to develop the control method for stabilizing the rotational motion of a rigid spacecraft with tow control inputs. For this purpose, the zero dynamics method can be applied to make the solutions of Euler's rotational equations be restricted to the invariant submanifold. In the right figure, the blue, green, and red lines show the polhode in an initial angular momentum, the zero dynamics, and the trajectories of the solutions from several initial points, respectively. It is shown that each trajectory of the solution first enters into the zero dynamics and next converges to the equilibrium point. [Reference]
|
|