| 2トルク入力による衛星回転運動の安定化 | |
 |
|
|
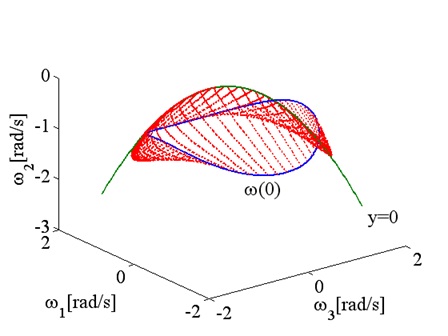
3軸回りの剛体の回転運動を2軸回りのトルク入力により制御する問題が近年注目されています. 故障時に対する制御アクチュエータの冗長性や消費燃料の節約などの工学的利点が考えられます. また,この問題に対する解法は幾何学的手法に基づく非線形制御理論の構築に直結するため,理論的観点からも興味深い研究課題となっています. 右図における青線はある与えられた初期角運動量におけるポルホード軌跡を示しており, 緑線はゼロダイナミクスと呼ばれる部分多様体を示しており, 赤線は適当な初期値からの解の軌跡を示しています. どの初期値から出発しても,解はまずゼロダイナミクスに拘束され,そこら脱出することなく原点へ収束する様子が示されています. [参考文献]
|
|